
-
Tebis 4.1 Release 11:バーチャルで検証し、より安全で高精度な加工へ
Tebis 4.1 Release 11ではパフォーマンス、安全性そして操作性をさらに進化させました。- 超高速の工具検索新機能により、データ量が非常に大きな場合であってもワークフロー全体の大幅な高速化が可能になります。
- より早い段階における干渉検知機能、シミュレーション機能の強化そしてフレキシブルな位置決め機能のおかげで、より安全で直観的なロボット加工が可能になります。
- さらに自動干渉回避機能が、レーザー加工に対応し、より信頼性の高い加工を実現できます。
つまり、Release 11は日々の作業をこれまで以上に早く安全で快適にします。超高速工具検索
データ量が大きな場合でも問題なく
Tebis Release 11ではさらにパフォーマンスが大幅に向上されました。よりスムーズな操作性、素早い応答時間そして格段に短縮された検索および読み込みプロセスなど、多くの領域でその変化を感じることができます。ライブラリー情報、NCジョブ、変数や形状に対し大幅に処理速度が向上し、大規模プロジェクトや複雑なデータを扱う場合に最適です。
中でも特に効果を実感できるのが工具検索です。内部および外部参照のライブラリの工具を首下長や直径、あるいは工具タイプや任意の検索ワードなどをもとに、工具ライブラリーもしくはNCジョブから直接検索できるようになりました。
拡張し続ける工具ライブラリの透明性を最大限に確保し、これを完全に管理できるようになります。
お客様のメリット
超高速な工具検索: 非常に大きなライブラリーであっても、工具を数秒で検索
待ち時間のないスムーズな作業: 数多くのシステム速度が格段に短縮
工具データを効率的に管理: データ保存先に関わらず効率的に管理
日々の作業がより効率的に: よりスピーディーに検索、よりスピーディーに意思決定から加工を行えます。
その結果、Tebis Release 11は、システム全体のパフォーマンスを大幅に向上させるとともに、工具管理、検索においても高い性能を実現します。
最適化されたロボット加工
より安全で直観的に
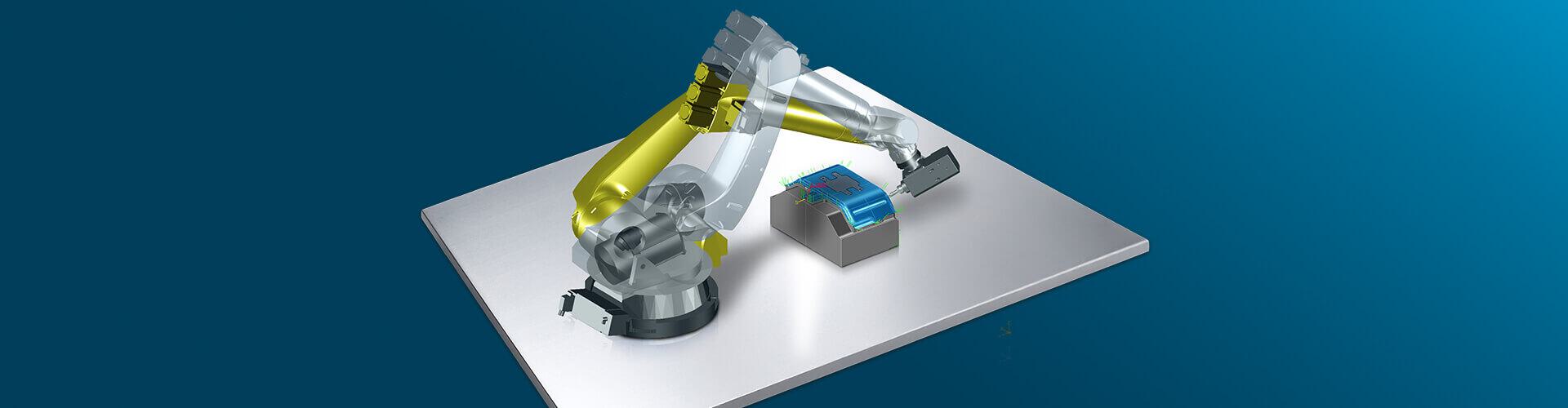
Release 11ではTebisのロボット加工が大幅に拡張され、より確かな安全性、さらなる柔軟性および操作性が提供されるようになりました。従来通りのTebisのバーチャル CAD/CAM環境上に、作業空間を含めた加工プロセスやロボットの動作を事前に検証・制御できるようになりました。追加軸を含め最大8軸までのロボットに対応しています。
計算段階でのロボット固有の干渉を早期検出ロボット特有の干渉を、ツールパスの計算段階で検知することができるようになりました。
Tebisは特異点、および構成の変更を、インタラクティブにこれまでよりも早い段階で検知できるようになりました。干渉は分かりやすく可視化され、モデル内で直接スピーディーかつ論理的に対処され、完全にインタラクティブに修正されます。CAMプログラミングの段階から安全性を高め、手戻りを削減できます。接続動作まで含めたシミュレーションさらにシミュレーション機能も拡張されました。Tebisはツールパスに加えてロボット加工における全ての接続動作まで、つまりツールパス間の動きおよび工具交換の動きまで確認します。実際の機械を用いて実際にプロセスをスタートさせる前段階から、ロボット加工において起こり得る干渉をより網羅的に検知できるようになりました。
最適化されたツールパスおよび柔軟な位置決めによるプロセス品質の向上
お客様のメリット
- 安全性の向上:計算中の干渉の早期検知およびシミュレーションを用いた全ての接続動作の追加チェック
- 高い柔軟性:ロボット姿勢と追加軸を自由に組み合わせ、最適な位置決めが可能
- 直観的で柔軟性の高い操作:干渉を簡単に解決し、位置決めを直接最適化
- 最大限の利便性:全ての機能を使い慣れたTebis環境内で一貫して利用できます。
その結果:スピーディーで安全そして干渉無しのロボット加工向けNCプログラムが効率的に作成され、これを快適に最適化できます。
レーザー加工の安全性を向上
自動干渉回避機能がレーザー加工にも対応するようになりました
Tebis Release 11ではレーザー加工の安全性と操作性がさらに向上しました。
実績のあるTebisの干渉回避機能がレーザー加工およびレーザー肉盛りでも利用できるようになり、プロセス全体の安全性が確保されます。加工機ヘッドを完全に考慮し、計算段階から確実に干渉の恐れがある箇所を検知し、安全に回避できる経路を生成します。手作業による調整を大幅に削減します。シミュレーションの「角度/干渉回避」機能を用いて加工姿勢を確認・評価できます。安全な回避が不可能な場合には、干渉領域の境界にある該当するベクトルをTebis が直接CADモデルに保存します。こうすることで問題のある箇所を正確に特定、評価し、解決に繋げることができます。
お客様のメリット
- 高い安全性:レーザー加工においても、加工機ヘッドを完全に考慮した干渉回避が可能に
- プログラミング工数の軽減:作業による調整や修正を大幅に軽減
- 問題箇所を正確に把握:CADモデル上での問題箇所の可視化による分析
- 柔軟な操作性:自動干渉回避と手動による最適化を組み合わせ可能
その結果:より安全で効率的かつ干渉フリーのレーザー加工プログラムが可能になります。その際加工機ヘッドもインテリジェントに保護され加工品質とプロセスの信頼性をさらに向上させます。
お気軽にお問い合わせ下さい
